
DOSSIER
N°4
Anomalies
dans le système solaire
ANOMALIES
SUR PHOBOS
(
PARTIE 2)

La
sonde Mars Reconnaissance Orbiter (acronyme : MRO). MRO est une sonde
spatiale américaine actuellement en orbite autour de la planète Mars. Son
lancement, initialement prévu par
la NASA
le 10 août
2005, a
du être reporté à deux reprises, suite à des incidents techniques. Elle a
été finalement lancée avec succès, le vendredi 12 août 2005, pour une odyssée
d’environ 500 millions de kilomètres en direction de Mars.
Document 1 : la
sonde Mars Reconnaissance Orbiter au-dessus de la planète Mars (vue d'artiste).
Mieux
comprendre Mars. Mars Reconnaissance Orbiter (MRO), dont les objectifs
scientifiques sont multiples, devrait permettre d’améliorer notre compréhension
de Mars grâce à une observation détaillée de sa surface. Elle permettra
aussi de sélectionner d’éventuels sites d’atterrissages, ou
d’amarsissage, pour les prochaines missions. Elle fera office de relais à
haut débit pour les futures bases installées à la surface de la planète
rouge. Elle remplacera la vieillissante sonde Mars Global Surveyor comme
plate-forme principale d’observation. MRO est devenue, une fois en orbite, le
quatrième satellite artificiel en activité autour de Mars, rejoignant ainsi la
sonde européenne Mars Express, et les deux sondes de
la NASA
, Mars Odyssey et Mars Global Surveyor.
Des
images exceptionnelles. Après Mars Express en 2004, Mars Reconnaissance
Orbiter a photographié le satellite Phobos. Ces images d’une très grande
qualité ont été acquises le 23 mars 2008 par la caméra Hirise. Leur analyse
va, sans aucun doute, faire avancer de façon significative nos connaissances de
ce mystérieux satellite. Phobos, que l’on pense riche en glace d’eau et
matière carbonée, est similaire à
la Lune. Sa
surface est criblée de cratères de toutes tailles et recouverte d’une
couche de poussière (régolite) issue de la décomposition du sol par le vent
solaire et les impacts météoritiques.

Document 2 : la
caméra Hirise en cours d'assemblage.
Des
images en très haute-résolution.
La caméra Hirise (en anglais High Resolution Imaging Science Experiment) est
constituée d’un télescope réfléchissant de
0,50 mètre
(
50 centimètres
de diamètre). C’est le plus grand télescope jamais embarqué à bord
d’une sonde spatiale de ce type. Hirise a une résolution angulaire qui
correspond à
0,30 mètre
au sol depuis une hauteur de
300 kilomètres
. Elle prend des clichés dans trois bandes de couleurs : en bleu-vert, en rouge
et dans l’infrarouge. Pour faciliter la cartographie de sites potentiels
d’amarsissage, la caméra Hirise peut produire des images stéréo. On peut
ainsi estimer la topographie d’un site avec une précision de
0,25 mètre
. Cette résolution de 25 à
32 centimètres
par pixel permet de voir des détails d’environ
1 mètre
. Hirise est capable de « voir » des objets pas plus gros qu’un
ballon de football. A titre de comparaison, les plus petits détails visibles
sur les images obtenues par les orbiteurs Viking, qui ont étudié la planète
rouge entre 1976 et 1982, avaient la taille d’un terrain de football. La résolution
de cette petite merveille de technologie est de cinq fois supérieure à celle
de la caméra MOC embarquée à bord de Mars Global Surveyor. Cependant, les
clichés pris par Hirise couvriront un champ très petit, de sorte qu’en deux
ans, elle ne pourra photographier qu’environ 1% de la surface de Mars. Les
zones à observer seront donc soigneusement sélectionnées à partir des données
fournies par les précédentes sondes. Plus de 10.000 images en très haute définition
sont attendues tout au long de la mission primaire de deux ans (2006 - 2008).
MRO devrait envoyer vers la Terre
cinq fois plus de données que toutes les sondes martiennes qui l’ont précédé.
Malheureusement, le public ne pourra accéder qu’à un tout petit nombre de
ces images qui seront, nous n’en doutons pas, soigneusement sélectionnées.
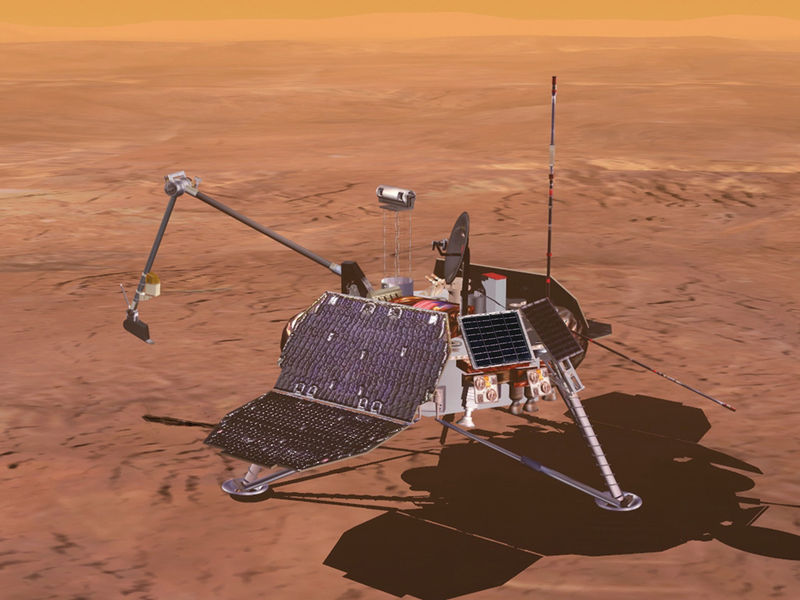
Document 3 : le robot
Mars Polar Lander posé sur le sol de Mars (vue d’artiste). Malheureusement,
cette image n'est qu'une reconstitution car la
mission fut un échec et le robot ne se posa jamais sur Mars.
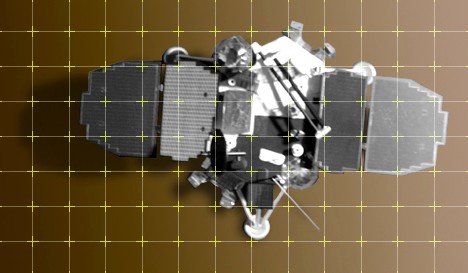
Document 4 :
Mars Polar Lander vu de dessus. Cette image nous servira de modèle pour
comparer la puissance de résolution entre la caméra haute résolution (MOC :
en anglais Mars Orbital Camera) embarquée sur la sonde Mars Global Surveyor
(MGS), et la caméra Hirise embarquée à bord de Mars Reconnaissance Orbiter
(MRO).
Document
5 : à gauche, le robot Mars Polar
Lander vu par la caméra haute résolution MOC (Mars Orbital Camera), et à
droite, le même robot vu par Hirise. La résolution de l’image de droite est
cinq fois supérieure à celle de gauche.
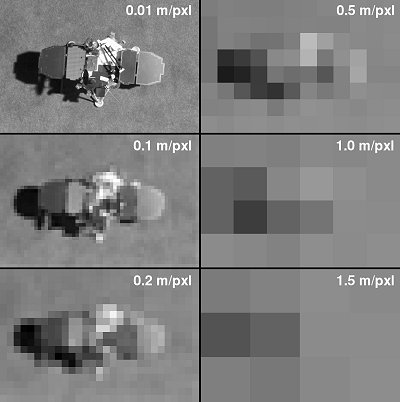
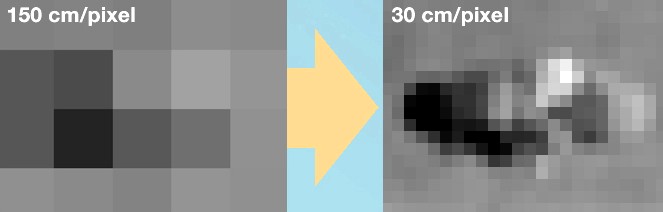
Document 6 : le robot Mars
Polar Lander photographié avec différentes résolutions. En haut à gauche, la
résolution est de
1 centimètre
par pixel. En bas à droite, la résolution est de
1,5 mètre
par pixel. La meilleure résolution possible de la caméra qui équipe Mars
Global Surveyor (MOC) est de
1,5 mètre
par pixel. A ce niveau, le robot n’occupe au sein de l’image qu’un seul
pixel grisâtre. Avec ses 30 centimètres par pixel, la caméra Hirise permet
donc de distinguer très nettement des objets dont les dimensions peuvent
atteindre plusieurs mètres. Ce point est important à signaler car les
anomalies qui apparaissent sur les documents photographiques que nous
présentons ci-dessous ont certainement été photographiés avec ce niveau de
précision (mais nous ne verrons jamais ces anomalies avec autant de précision).

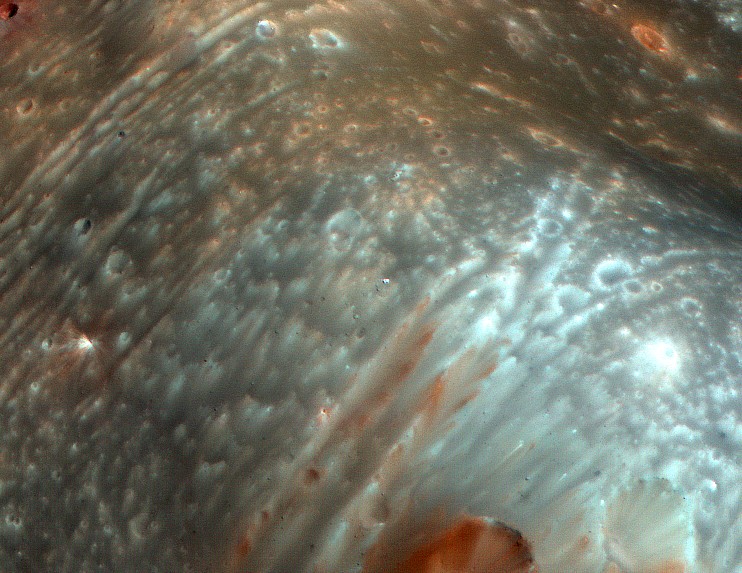
Document 7 : Phobos,
photographié le 23 mars 2008. Les détails les plus petits mesurent
20 mètres (source Nasa).
Document 8 : anomalie 1,
au centre une forme régulière (source Nasa).
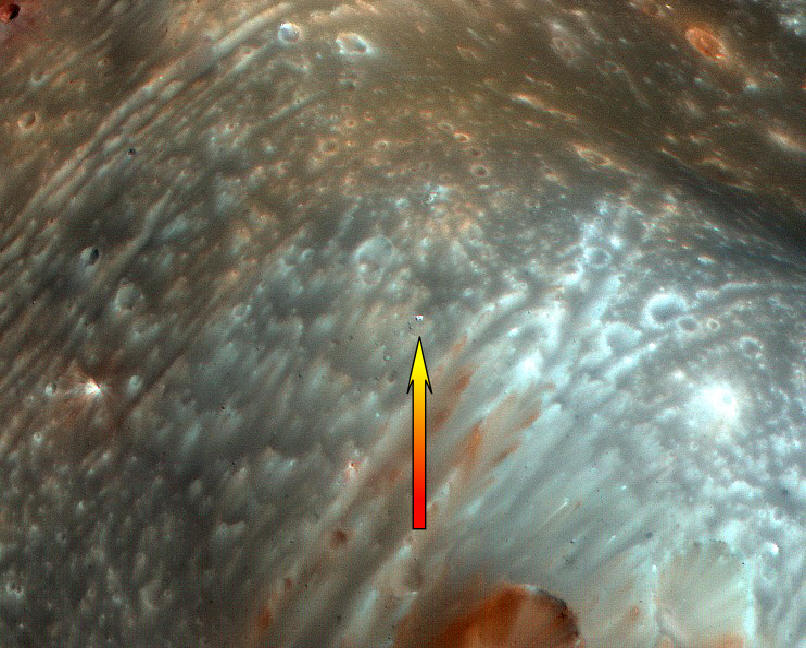
Document 9 : anomalie 1,
au centre, au-dessus de la flèche (source Nasa).
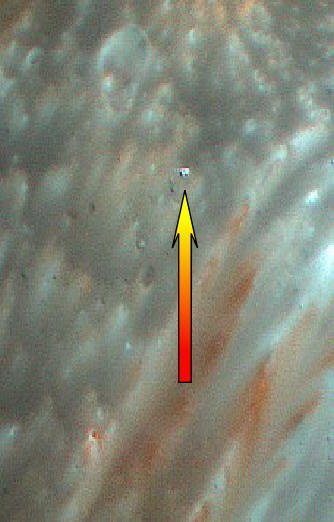
Documents 10 : anomalie
1, agrandissements (source Nasa).



Documents 11 : anomalie
2, avec agrandissement (source Nasa).



Documents 12 : anomalie
3, avec agrandissement (source Nasa).
Une mission cruciale pour
la Nasa. MRO
est plus qu’une simple mission martienne de plus. Elle est même cruciale
pour
la Nasa
puisqu’un échec retarderait tout le programme d’exploration de la planète
rouge prévu pour la décennie à venir. En effet, le nom de la sonde n’est
pas anodin, Mars Reconnaissance Orbiter est bien partie en reconnaissance.
C’est elle qui permettra de choisir les prochains sites à étudier. De plus,
c’est aussi elle qui servira de balise de navigation pour effectuer des
atterrissages de haute précision. Enfin, c’est encore elle qui relayera vers
la Terre
les données collectées par les engins au sol. La mission MRO prépare donc
l’avenir, c’est-à-dire le retour d’échantillons et même, aux dires de
la Nasa, l’arrivée de l’homme sur la planète rouge.
D’où
vient Phobos ? Phobos est une des plus petites lunes du Système
Solaire avec des formes très irrégulières (
27 km
x
22 km
x
19 km
). Sa surface est littéralement criblée de cratères d’impact. Son plus
grand cratère (le cratère Stickney) a un diamètre de
10 km
, soit plus de 30 % de la taille du satellite. Phobos orbite à une distance de
6000 km
au-dessus de Mars. Aucun autre satellite dans le système solaire n’est aussi
proche de sa planète. Les astronomes considèrent qu’en raison de cette
proximité avec la planète rouge, Phobos est condamné. Dans environ 40
millions d’années environ, le satellite pourrait soit se briser pour former
un anneau autour de Mars, soit s’écraser à sa surface. De l’histoire de
Phobos on ne sait pas grand-chose. Il n’est même pas certain que cette lune
de Mars se soit formée en même temps que la planète rouge. L’idée qui prévaut
actuellement est que, comme Deimos, Phobos serait un astéroïde de la ceinture
de Kuiper capturé par Mars, mais le mécanisme de cette capture n’est pas
encore très bien compris.

Documents 13 : Phobos
photographié en orbite autour de Mars. La proximité de Phobos par rapport à
Mars a longtemps intrigué les astronomes.
Le
cratère Stickney. Stickney est le cratère le plus remarquable de Phobos
avec un diamètre d’environ
10 km
. C’est une formation impressionnante si l’on considère les dimensions
modestes de Phobos. Il est probable que l’impact à l’origine de sa
formation a bien failli pulvériser le satellite. Les stries qui parcourent sa
surface en sont les conséquences les plus visibles. Elles atteignent à
certains endroits
700 mètres
de large et
90 mètres
de profondeur.

Documents 14 : le
cratère Stickney avec des stries profondes sur ses pentes (source Nasa).
©
Daniel Robin juillet 2008.
Anomalies
sur Phobos : partie 1.
Retour
Accueil Dossiers